PID-Verhalten
PID Regler bestehen aus drei verschiedenen Übertragungsverhalten.
P = Proporzional (Eine Multiplikation mit der Regelabweichung)
I = Integration (Eine aufsummierung der Regelabweichung)
D = Differenzierung (Ein Anstieg bei einer Aenderung der Regelabweichung)
In der Technik werden die Regler mit diesen Übertragungsverhalten erstellt. In der Natur findet man öffters auch Messungen welche ein D-Verhalten haben. Eigentlich sind wir Delta-Organismen, unsere Sinnesorgane haben ein D-Verhalten. Je nach Frequenzmodulation oder Amplitudenmodulation haben die einzelnen Übertragungsverhalten eine andere Charakteristik. Dies kann am einfachsten mit einer Grafik dargestellt werden.
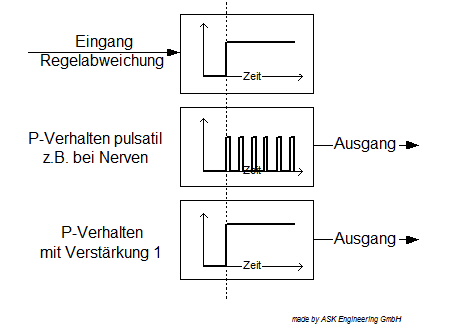
P-Verhalten
Die Darstellung zeigt das Verhalten bei einer Abweichnung z.B. von 0 auf 1 im Eingang wie sich der Ausgang verhaltet.
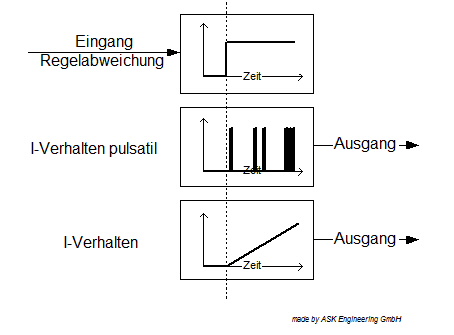
I-Verhalten
Das Integrationsverhalten I-Verhalten ist eine Aufsummierung. In der Technik wird dieses Verhalten gebraucht, damit es keine bleibende Regelabweichung gibt bei Regler.
Bei Menschen ist dieses Verhalten z. B. Schmerz vorhanden, wobei die Synapsen moduliert werden und der Schmerz immer stärker wird.
D-Verhalten
Das Differenzialverhalten D-Verhalten wird verwendet wenn die Abweichungen bewertet werden.
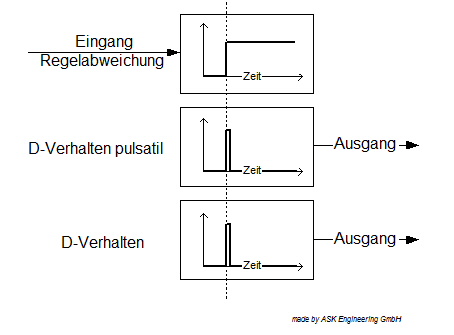
Die Habituation ist eine Reizgewöhnung und eine Anpassung des D-Verhaltens. Nach mehreren Reizen ist eine Abnahme der Reaktion vorhanden, resp. das PD Verhalten wird kleiner.
Mit diesen 3 Übertragungsverhalten können durch Kombination alle Verhalten in der Natur und Technik beschrieben werden . z.B. PI Verhalten oder PD Verhalten.
